一、潜伏牵引AGV
潜伏牵引AGV是一种特殊的自动导引车辆,它在车辆行驶过程中与路面保持一定的距离,通常是在车辆的底部或车辆的侧面。这种类型的AGV通常使用一种叫做潜伏牵引的技术,它使用一个低于车辆底部的传感器来检测路面,从而实现自动导引。
潜伏牵引AGV可分双向双驱动潜伏牵引、单驱动单向尾部牵引等,在工业生产中被广泛使用,因为它们能够提供高精度的导引性能,并且能够在复杂的工业环境中安全、稳定地行驶。它们通常被用于转运材料、装卸货物、运送零件和其他工业应用。
二、优点
潜伏牵引AGV能够在复杂的工业环境中地导引车辆,并且能够在车辆行驶过程中与路面保持一定的距离,这使得它们能够在复杂的工业环境中稳定地行驶。此外,还具有较高的载荷能力,能够承受比较大的负载,因此它们在工业生产中广泛使用。
三、AGV小车结构
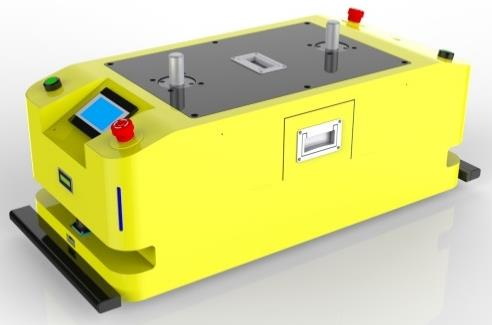
3.1、车身
外观肉眼可以看得到的小车底盘、车架、车轮、显示屏以及各个按键等,车身通常是由铝合金或钢板制成,并配有支撑轮和动力轮。
3.2、车身内部结构(电机、减速箱、电路、电控系统以及各个系统等)
传动系统:包括电机、减速机、齿轮箱和轮胎。AGV 小车的传动系统负责将电能转化为动力,并通过轮胎带动车身前进;
导引系统:包括导引装置、导引信标和传感器。AGV 小车的导引系统负责按照预设路径导引车辆前进;
控制系统:包括微处理器控制器、控制电路和软件。控制系统负责接收来自导引系统的信息,并根据信息控制传动系统的工作;
电源系统:包括电池、充电器和电源管理系统。电源系统负责为整车提供电能,直流电压有12伏、24伏、48伏及72伏。
附加装置:包括载物台、夹具和其他附加设备。
四、AGV小车如何避让
AGV小车会使用传感器(例如激光传感器、超声波传感器或红外传感器)来扫描周围的环境,以便及时发现障碍物。当探测到障碍物时,它会调整自己的路径,避开障碍物。如果AGV小车探测到障碍物在它前方,它可能会向左或右转弯,或者停下来等待障碍物移开。
需要注意的是,AGV小车在避让障碍物时可能会受到路径规划算法的限制,因此它可能不会立即避开障碍物,而是会在避开障碍物的同时尽量保证路径规划的准确性。AGV小的避让能力也可能受到传感器的精度和范围的限制,应该注意设置适当的传感器。
总部
王先生 166 2067 5888(微信同号)
座 机:0769 2221 6826
地 址:广东省东莞市东城汉塘街26号E栋
东南亚越南分公司
电话:0084-9188 90910(文先生)
电话:0084-0335 355585(杜小姐)
电话:189 2527 1259(微信同号)文先生
地址:北宁省桂武县凤毛社毛竖村18号路





